本篇文章主要对STM32建立项目的过程进行介绍,并对代码进行简要分析。
首先是使用CubeMX配置芯片引脚。RoboMaster开发版B型的芯片是STM32F105R8Tx系列,按照开发板的手册对芯片引脚进行配置,我这里主要用到了两个串口,USART2和USART3,两个LED的引脚,以及几个定时器的输出引脚,用于生产PWM波。
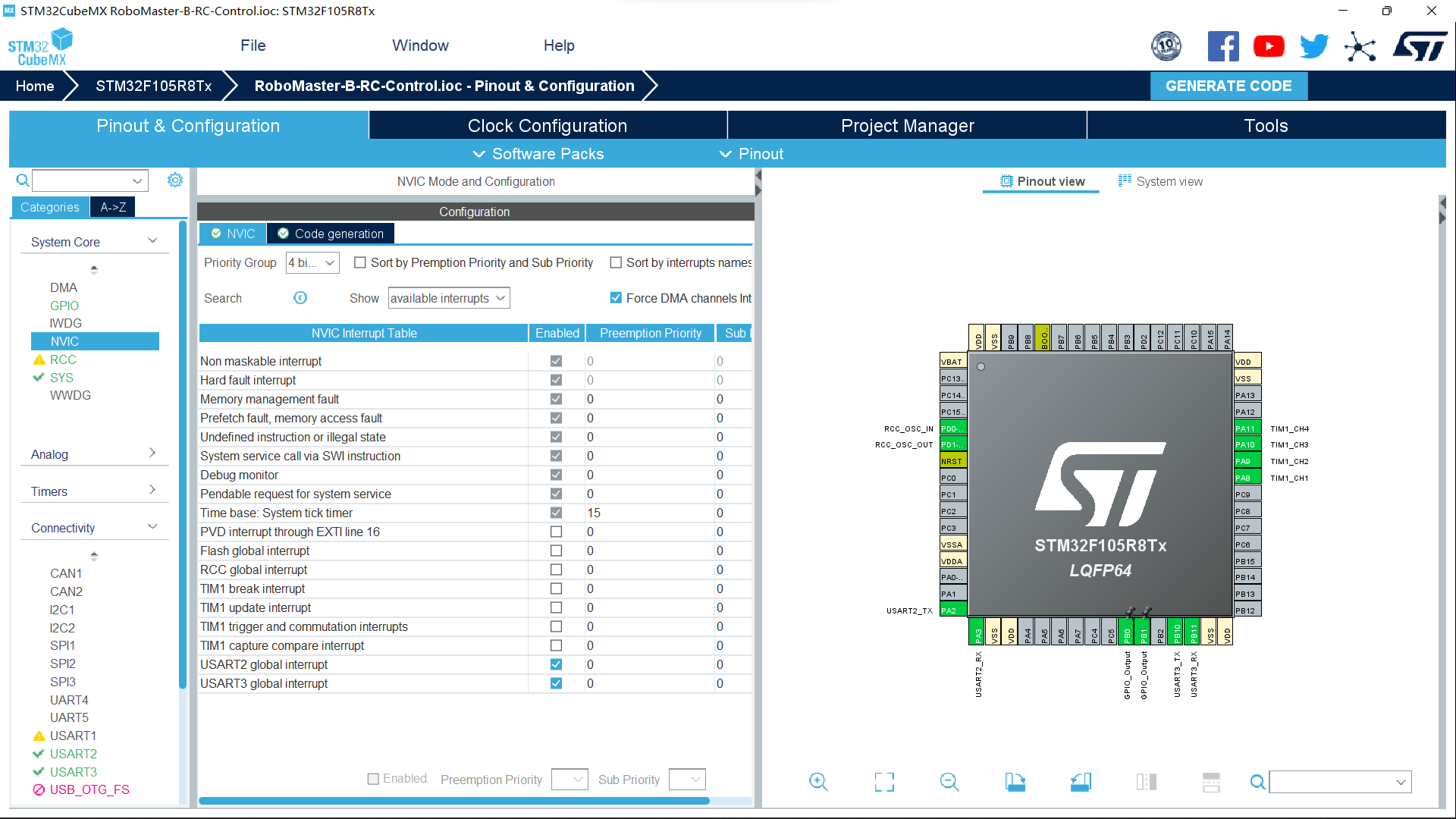
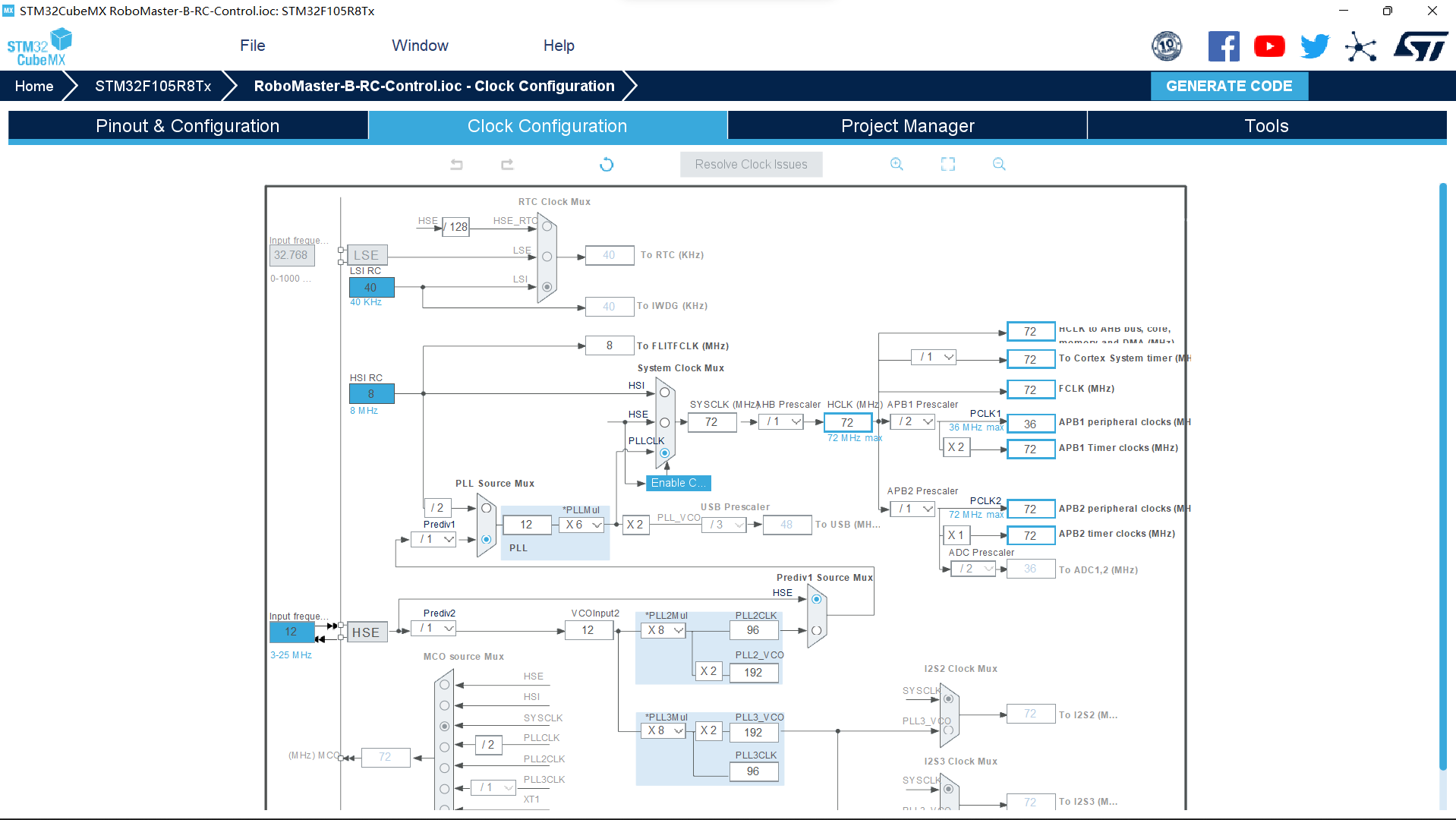
随后导出Keil项目即可。不得不说,现在的STM32开发比以前简单不少,很多都可以通过配置来生成代码。
下面是主循环部分,通过设置一个超时时间,避免在一段时间收不到控制信号后,单片机仍然执行动作:
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
MX_USART2_UART_Init();
MX_USART3_UART_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start(&htim1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_4);
HAL_UART_Receive_IT(&huart2, &single_buffer_uart2, 1);
HAL_UART_Receive_IT(&huart3, &single_buffer_uart3, 1);
//__HAL_UART_ENABLE_IT(&huart2, UART_IT_RXNE); // receive interrupt
__HAL_UART_ENABLE_IT(&huart2, UART_IT_IDLE); // idle interrupt
//__HAL_UART_ENABLE_IT(&huart3, UART_IT_RXNE); // receive interrupt
__HAL_UART_ENABLE_IT(&huart3, UART_IT_IDLE); // idle interrupt
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
__HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_1, mid_point + steer);
__HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_2, mid_point + speed);
//__HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_3, mid_point);
//__HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_4, mid_point);
timeout_count++;
if(timeout_count > TIMEOUT) {
steer = 0;
speed = 0;
}
HAL_Delay(10);
}
/* USER CODE END 3 */
}
接下来是串口接收部分,算是整个程序最复杂的部分,通过解析输入的数据,来判断执行的操作,同时还对输入指令部分添加了CRC校验,避免数据出错:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
#include "stdint.h"
#include "stdio.h"
#include "string.h"
/* USER CODE END 0 */
UART_HandleTypeDef huart2;
UART_HandleTypeDef huart3;
/* USART2 init function */
void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
/* USART3 init function */
void MX_USART3_UART_Init(void)
{
/* USER CODE BEGIN USART3_Init 0 */
/* USER CODE END USART3_Init 0 */
/* USER CODE BEGIN USART3_Init 1 */
/* USER CODE END USART3_Init 1 */
huart3.Instance = USART3;
huart3.Init.BaudRate = 115200;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart3) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART3_Init 2 */
/* USER CODE END USART3_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if (uartHandle->Instance == USART2)
{
/* USER CODE BEGIN USART2_MspInit 0 */
/* USER CODE END USART2_MspInit 0 */
/* USART2 clock enable */
__HAL_RCC_USART2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART2 interrupt Init */
HAL_NVIC_SetPriority(USART2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART2_IRQn);
/* USER CODE BEGIN USART2_MspInit 1 */
/* USER CODE END USART2_MspInit 1 */
}
else if (uartHandle->Instance == USART3)
{
/* USER CODE BEGIN USART3_MspInit 0 */
/* USER CODE END USART3_MspInit 0 */
/* USART3 clock enable */
__HAL_RCC_USART3_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**USART3 GPIO Configuration
PB10 ------> USART3_TX
PB11 ------> USART3_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USART3 interrupt Init */
HAL_NVIC_SetPriority(USART3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART3_IRQn);
/* USER CODE BEGIN USART3_MspInit 1 */
/* USER CODE END USART3_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if (uartHandle->Instance == USART2)
{
/* USER CODE BEGIN USART2_MspDeInit 0 */
/* USER CODE END USART2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART2_CLK_DISABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_2 | GPIO_PIN_3);
/* USART2 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART2_IRQn);
/* USER CODE BEGIN USART2_MspDeInit 1 */
/* USER CODE END USART2_MspDeInit 1 */
}
else if (uartHandle->Instance == USART3)
{
/* USER CODE BEGIN USART3_MspDeInit 0 */
/* USER CODE END USART3_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART3_CLK_DISABLE();
/**USART3 GPIO Configuration
PB10 ------> USART3_TX
PB11 ------> USART3_RX
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_10 | GPIO_PIN_11);
/* USART3 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART3_IRQn);
/* USER CODE BEGIN USART3_MspDeInit 1 */
/* USER CODE END USART3_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */W
void HAL_UART_RxCpltCallback(UART_HandleTypeDef* huart)
{
if (huart->Instance == USART2)
{
read_buffer_uart2[current_buffer_length_uart2] = single_buffer_uart2;
current_buffer_length_uart2++;
// HAL_UART_Transmit(&huart1, &single_buffer, 1, 100);
HAL_UART_Receive_IT(&huart2, &single_buffer_uart2, 1);
}
if (huart->Instance == USART3)
{
read_buffer_uart3[current_buffer_length_uart3] = single_buffer_uart3;
current_buffer_length_uart3++;
// HAL_UART_Transmit(&huart1, &single_buffer, 1, 100);
HAL_UART_Receive_IT(&huart3, &single_buffer_uart3, 1);
}
}
void UART_IDLECallBack(UART_HandleTypeDef* huart)
{
/*uart1 idle processing function*/
if (huart == &huart2)
{
current_buffer_length_uart2 = 0;
timeout_count = 0;
PROTOCOL_Handle(huart);
__HAL_UART_CLEAR_IDLEFLAG(huart);
}
if (huart == &huart3)
{
current_buffer_length_uart2 = 0;
timeout_count = 0;
PROTOCOL_Handle(huart);
__HAL_UART_CLEAR_IDLEFLAG(huart);
}
}
void PROTOCOL_Handle(UART_HandleTypeDef* huart)
{
uint8_t low_value = 0x00;
uint8_t high_value = 0x00;
if (huart == &huart2)
{
// CRC
CRC16_Modbus(read_buffer_uart2, 6, &low_value, &high_value);
// if (read_buffer_uart2[6] != low_value || read_buffer_uart2[7] != high_value)
// return;
switch (read_buffer_uart2[1])
{
case 0x01:
{
}
break;
case 0x02: {
memcpy(&steer, read_buffer_uart2 + 2, sizeof(int32_t));
if (steer > 500)
{
steer = 500;
}
else if (steer < -500)
{
steer = -500;
}
}
break;
case 0x03: {
memcpy(&speed, read_buffer_uart2 + 2, sizeof(int32_t));
if (speed > 500)
{
speed = 500;
}
else if (speed < -500)
{
speed = -500;
}
}
break;
}
}
if (huart == &huart3)
{
// CRC
CRC16_Modbus(read_buffer_uart3, 6, &low_value, &high_value);
// if (read_buffer_uart2[6] != low_value || read_buffer_uart2[7] != high_value)
// return;
switch (read_buffer_uart3[1])
{
case 0x01:
{
}
break;
case 0x02: {
memcpy(&steer, read_buffer_uart3 + 2, sizeof(int32_t));
}
break;
case 0x03: {
memcpy(&speed, read_buffer_uart3 + 2, sizeof(int32_t));
}
break;
}
}
}
void CRC16_Modbus(uint8_t input[], int size, uint8_t* low_value, uint8_t* high_value)
{
uint16_t crc = 0xffff;
for (int n = 0; n < size; n++)
{
crc = input[n] ^ crc;
for (int i = 0; i < 8; i++)
{
if (crc & 0x01)
{
crc = crc >> 1;
crc = crc ^ 0xa001;
}
else
{
crc = crc >> 1;
}
}
}
*low_value = crc & 0xFF;
*high_value = (uint8_t)(crc >> 8);
}
int fputc(int ch, FILE* f)
{
HAL_UART_Transmit(&huart2, (uint8_t*)&ch, 1, 1000);
return (ch);
}
int fgetc(FILE* f)
{
int ch;
HAL_UART_Receive(&huart2, (uint8_t*)&ch, 1, 1000);
return (ch);
}
/* USER CODE END 1 */