这篇文章主要介绍无人机的结构组成。下面是从网上淘到的图片,里面有FPV无人机的基础结构。

无人机主要由机架、电机、电调、飞控、电源管理、接收机、摄像头、图传、视频天线、螺旋桨、电池组成。若只考虑必要的部分,那么只需要机架、电机、电调、飞控、电源管理、螺旋桨和接收机。现在很多的4in1或Nin1电调集成了电源管理与多个电调,可以直接连接电机使用,减少了设备数量,可以提高飞机的集成性,减小体积。
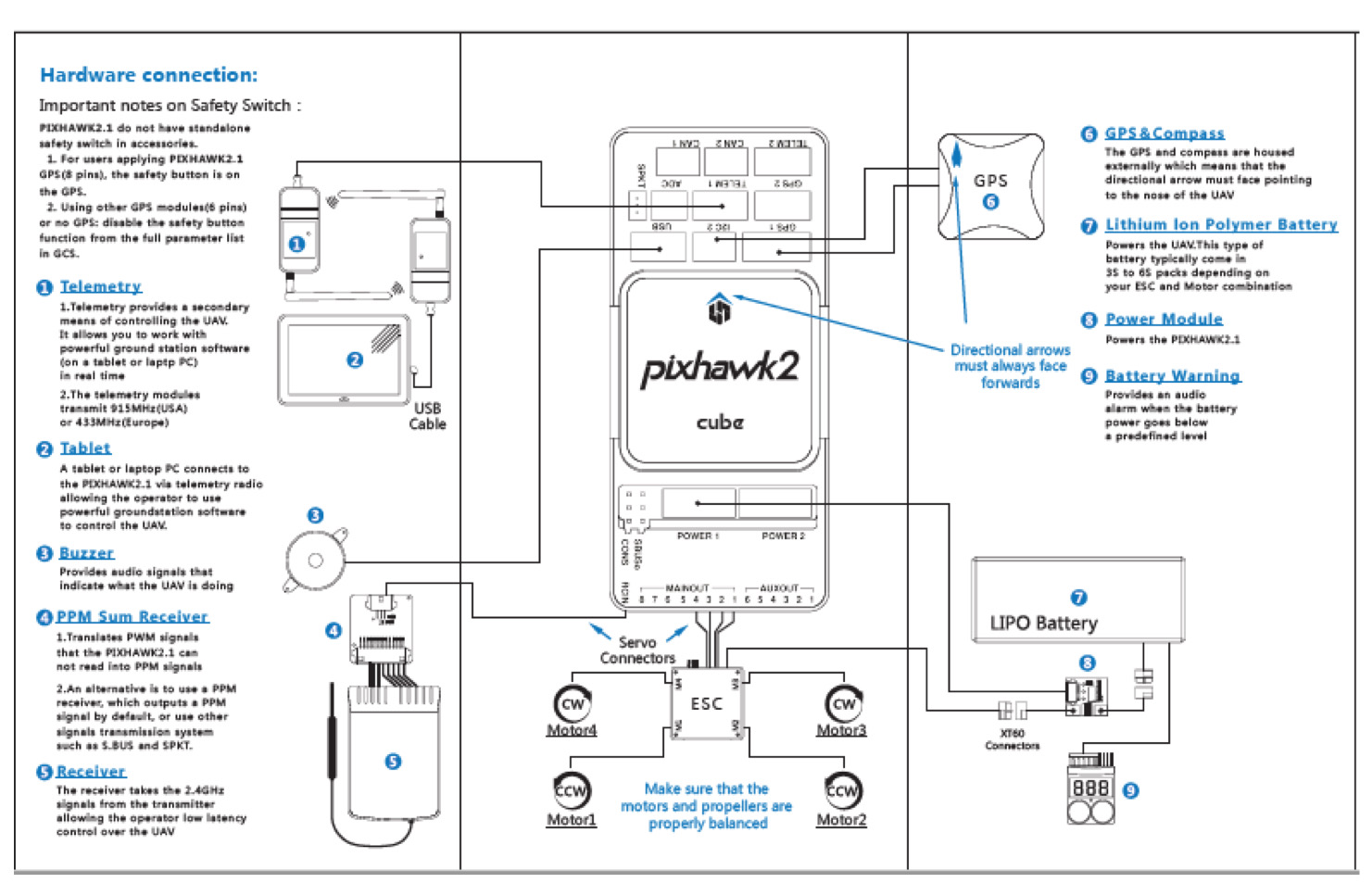
按照多旋翼飞行器设计与控制一书中描述的,上述设备与结构可以分为三个类型,机架、动力系统和指挥控制系统。多旋翼系统的连接如下图所示。这个Pixhawk的接线图很具有代表性。
机架的参数主要有重量、布局、轴距和材料。现在个人diy的好一点的四旋翼大多会采用碳纤维的机架。小一些的四旋翼的碳纤维机架只有100-200,可以算是入门的好选择。机架的布局包括三旋翼、四旋翼、六旋翼和八旋翼等,应用比较广泛的Pixhawk自动驾驶仪支持的飞机布局,可以在这个页面查看
动力系统包括螺旋桨、电机、电调以及电池。这个部分是影响整个无人机系统的性能的最重要的部分,需要进行仔细的设计计算以及权衡。
指挥控制系统包括遥控器、接收机和自驾仪。遥控器和接收机用来使用户控制飞机,自驾仪内部则包含了传感器和使飞机稳定飞行的软件。指挥控制系统还包括一个地面站,在需要执行更高级的任务时可以通过地面站完成与无人机的交互。
在WuKong这个无人机上,有机架、电机、三叶螺旋桨、4in1电调、飞控、摄像头和图传。4in1电调同时具有了电调与电源管理的能力。为了练习,我暂时去掉了图传的接线,只保留了基本飞行的能力。
下一节会详细介绍动力系统。在这个网站上可以由选择的零件计算无人机的动力参数:https://flyeval.com/