本文主要包括作业的三个部分,Part 1: 读入BVH文件的人体结构,Part 2:前向运动学计算,Part 3:运动重定向。
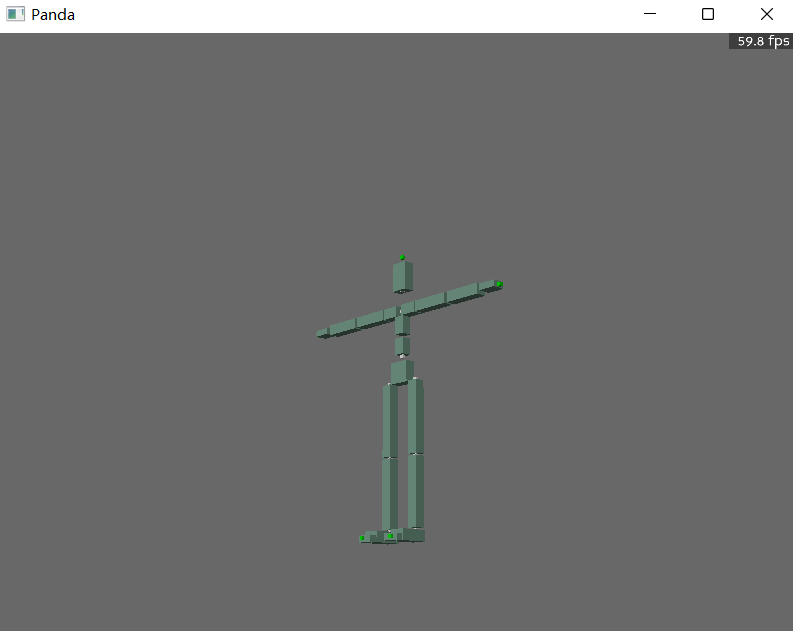
Part 1: 读入BVH文件的人体结构
关于BVH文件的结构介绍,作业中已经有了相关链接。我们只需要一行行的读取文件并处理就好了。其实对我来说,最麻烦的部分在于用Python写程序,我并不是很熟悉Python,所以很大一部分时间花在熟悉Python使用上。
def part1_calculate_T_pose(bvh_file_path):
"""请填写以下内容
输入: bvh 文件路径
输出:
joint_name: List[str],字符串列表,包含着所有关节的名字
joint_parent: List[int],整数列表,包含着所有关节的父关节的索引,根节点的父关节索引为-1
joint_offset: np.ndarray,形状为(M, 3)的numpy数组,包含着所有关节的偏移量
Tips:
joint_name顺序应该和bvh一致
"""
joint_name = []
joint_parent = []
joint_channel_count = []
joint_channel = []
joint_offset = []
lines = []
joint_stack = []
# read file
with open(bvh_file_path, 'r') as f:
lines = f.readlines()
#parse file
for i in range(len(lines)):
line = [name for name in lines[i].split()]
if line[0] == "HIERARCHY":
continue
elif line[0] == "MOTION":
break
elif line[0] == "CHANNELS":
joint_channel_count.append(int(line[1]))
joint_channel.append(line[2:len(line)])
elif line[0] == "ROOT":
joint_name.append(line[-1])
joint_parent.append(-1)
elif line[0] == "JOINT":
joint_name.append(line[-1])
joint_parent.append(joint_name.index(joint_stack[-1]))
elif line[0] == "End":
joint_name.append(joint_name[-1]+"_end")
joint_parent.append(joint_name.index(joint_stack[-1]))
elif line[0] == "OFFSET":
joint_offset.append([float(line[1]), float(line[2]), float(line[3])])
elif line[0] == "{":
joint_stack.append(joint_name[-1])
elif line[0] == "}":
joint_stack.pop()
joint_offset = np.array(joint_offset).reshape(-1, 3)
return joint_name, joint_parent, joint_offset
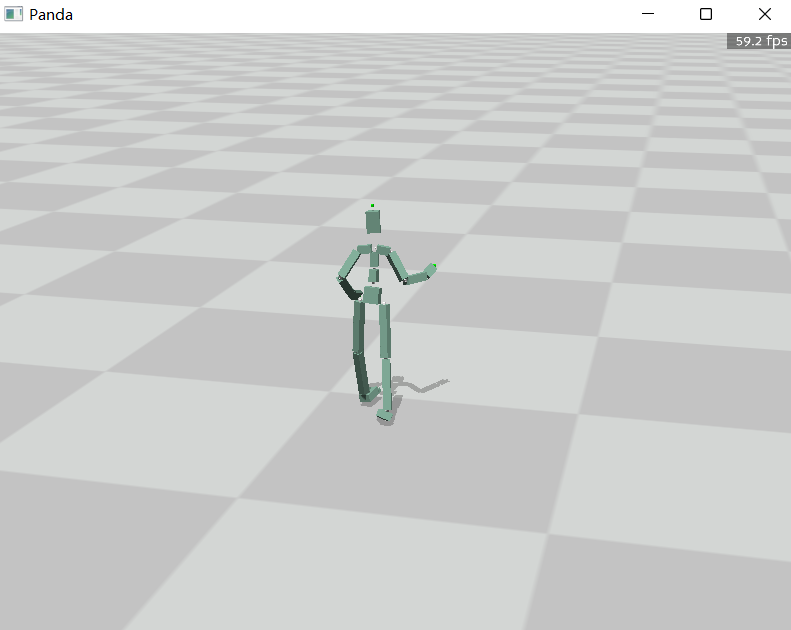
Part 2:前向运动学计算
由于我以前学过机器人学,所以这部分的内容就很简单了,关键在于避免搞错下标就好
def part2_forward_kinematics(joint_name, joint_parent, joint_offset, motion_data, frame_id):
"""请填写以下内容
输入: part1 获得的关节名字,父节点列表,偏移量列表
motion_data: np.ndarray,形状为(N,X)的numpy数组,其中N为帧数,X为Channel数
frame_id: int,需要返回的帧的索引
输出:
joint_positions: np.ndarray,形状为(M, 3)的numpy数组,包含着所有关节的全局位置
joint_orientations: np.ndarray,形状为(M, 4)的numpy数组,包含着所有关节的全局旋转(四元数)
Tips:
1. joint_orientations的四元数顺序为(x, y, z, w)
2. from_euler时注意使用大写的XYZ
"""
joint_positions = []
joint_orientations = []
frame_data = motion_data[frame_id]
frame_data = frame_data.reshape(-1, 3)
# calculate all quaternion
quaternion = R.from_euler('XYZ', frame_data[1:], degrees=True).as_quat()
# end joint don't have motion data, we will create one here
end_index = []
for i in joint_name:
if "_end" in i:
end_index.append(joint_name.index(i))
for i in end_index:
quaternion = np.insert(quaternion, i, [0,0,0,1], axis=0)
for index, parent in enumerate(joint_parent):
if parent == -1:
joint_positions.append(frame_data[0])
joint_orientations.append(quaternion[0])
else:
# calculate global rotation and postion
# Q_{i} = Q_{i-1} R_{i}
# p_{i+1} = p_{i} + Q_{i} l_{i}
quat_i = R.from_quat(quaternion[index])
quat_p = R.from_quat(quaternion[parent])
# quat = R.from_quat(quaternion)
rotation = R.as_quat(quat_i * quat_p) # q_{2} q_{1} [v] (q_{2} q_{1})^* : combine rotation
joint_orientations.append(rotation)
joint_orientations_quat = R.from_quat(joint_orientations)
offset_rotation = joint_orientations_quat[parent].apply(joint_offset[index])
joint_positions.append(joint_positions[parent] + offset_rotation)
joint_positions = np.array(joint_positions)
joint_orientations = np.array(joint_orientations)
return joint_positions, joint_orientations
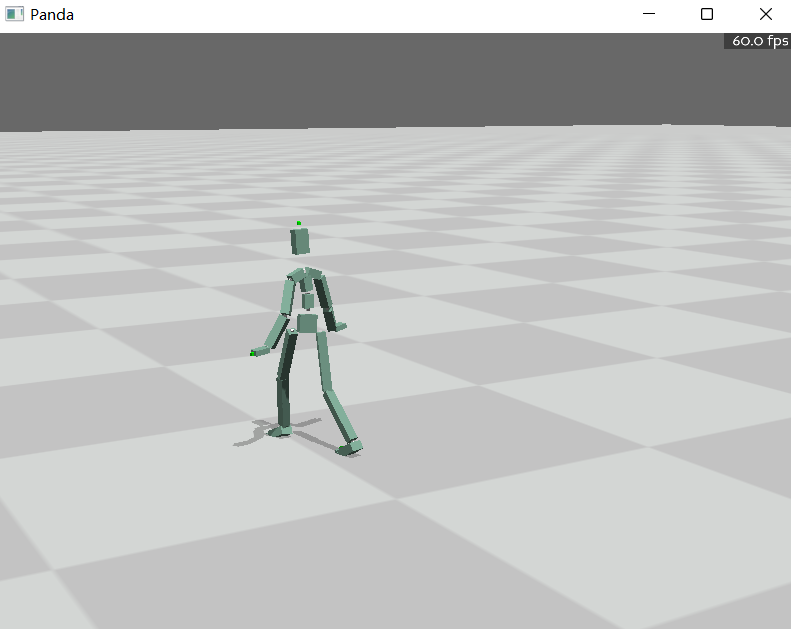
Part 3:运动重定向
这个部分内容主要是从A pose变成T pose,同时需要注意,虽然关节数量与名称没有变化,但是关节顺序改变了,因此需要对BVH的Motion Data进行重新排序,然后输出数据就可以了。需要注意的是,根节点的CHANNEL有6个,前三个是位置数据,重排序时需要将这个部分额外处理。本文中的重定向代码仅可以用于作业,不具有通用性。
课程作业链接给的外部数据集,由于需要使用git lfs工具,github提示我需要充值,免费流量不够,我就暂时放弃这个部分的工作了。
def part3_retarget_func(T_pose_bvh_path, A_pose_bvh_path):
"""
将 A-pose的bvh重定向到T-pose上
输入: 两个bvh文件的路径
输出:
motion_data: np.ndarray,形状为(N,X)的numpy数组,其中N为帧数,X为Channel数。retarget后的运动数据
Tips:
两个bvh的joint name顺序可能不一致哦(
as_euler时也需要大写的XYZ
"""
motion_data = []
motion_dict = {}
joint_remove_A = []
joint_remove_T = []
joint_name_T, joint_parent_T, joint_offset_T = part1_calculate_T_pose(T_pose_bvh_path)
joint_name_A, joint_parent_A, joint_offset_A = part1_calculate_T_pose(A_pose_bvh_path)
motion_data_A = load_motion_data(A_pose_bvh_path)
root_position = motion_data_A[:, :3]
motion_data_A = motion_data_A[:, 3:]
motion_data = np.zeros(motion_data_A.shape)
for i in joint_name_A:
if "_end" not in i:
joint_remove_A.append(i)
for i in joint_name_T:
if "_end" not in i:
joint_remove_T.append(i)
for index, name in enumerate(joint_remove_A):
motion_dict[name] = motion_data_A[:, 3*index:3*(index+1)]
for index, name in enumerate(joint_remove_T):
# simple convert from A pose to T pose
if name == "lShoulder":
motion_dict[name][:, 2] -= 45
elif name == "rShoulder":
motion_dict[name][:, 2] += 45
motion_data[:, 3*index:3*(index+1)] = motion_dict[name]
motion_data = np.concatenate([root_position, motion_data], axis=1)
return motion_data