上一篇文章中有一个细节没有提到,就是机器人跳跃到空中的时候,什么时候将腿摆动到期望的位置。作者的方法是,等机器人腾空一小段时间后,这个时候机器人有一定高度后,将腿缩短,然后向前摆动到期望的位置,再将腿伸长,避免足端摆动时意外触地,导致机器人绊倒。同时,为了进行机器人的位置控制,可以使用下述公式来计算期望的机器人速度:
x˙d=min[k(x−xd),x˙max]
这篇文章主要介绍从2D推广到3D的跳跃机器人控制。
Hopping in Three Dimensions
相比起2D的情况,3D多了什么呢?多出了一个平面以及一个旋转。经过作者分析,发现2D的平面机器人运动控制可以扩展到3D机器人的运动控制上。
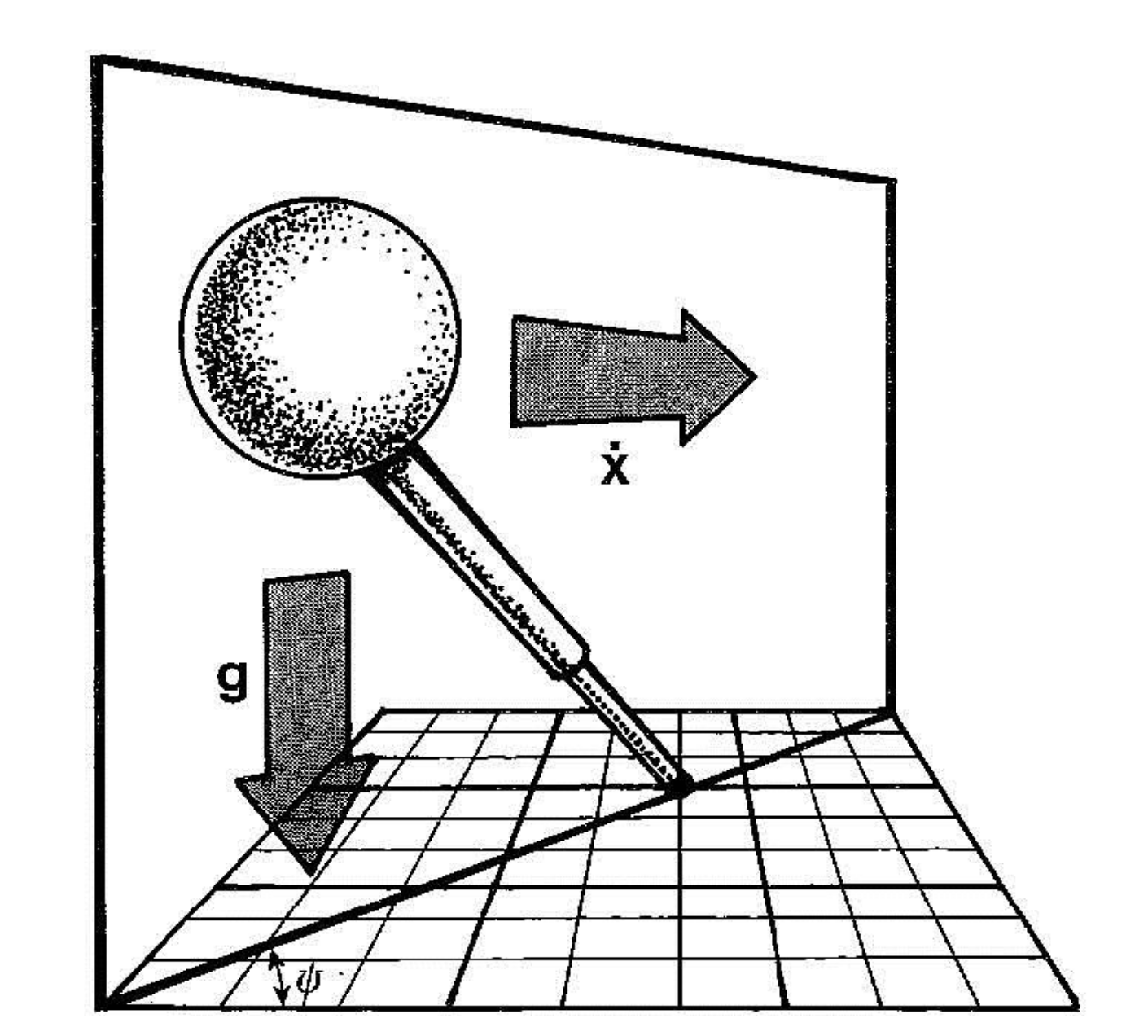
Balance in Three Dimensions
首先先不考虑绕Z轴的旋转控制,将三维空间拆分成XZ平面与YZ平面,在每个平面上,都可以使用2D的平面机器人控制算法来控制机器人运动。机器人的速度可以用以下公式来更新:
x˙i+1=x˙i+Δx˙
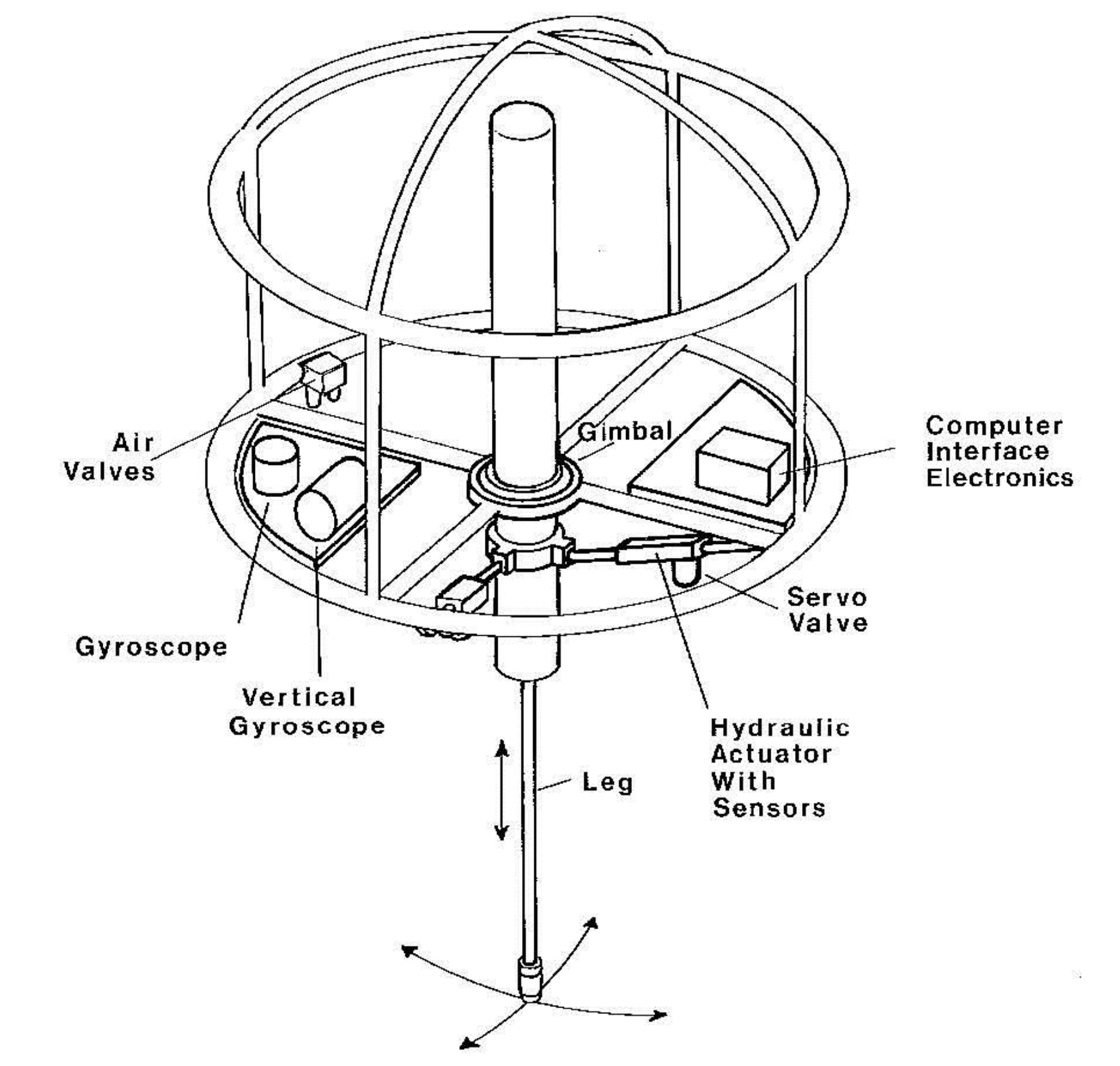
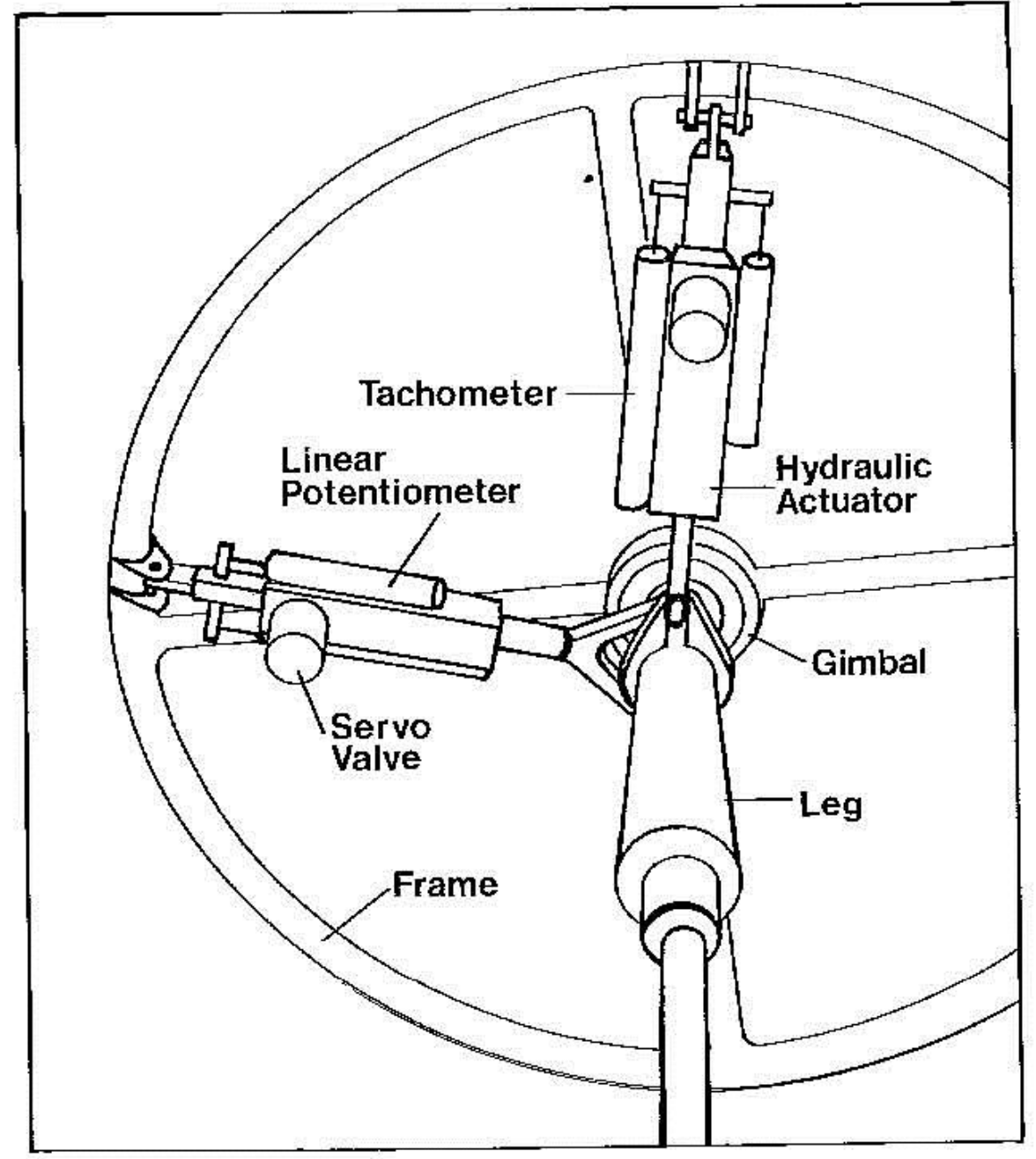
3D One-Legged Hopping Robot
为了实现机器人的控制,作者设计了一个单足3D跳跃机器人,腿部设计与平面跳跃机器人基本相同,但是可以进行足端的3D运动。这个结构是通过两个线性伸缩杆结合Hip关节的球铰实现的。
Control System for 3D One-Legged Machine
通过下述几个公式,就可以实现3D跳跃机器人控制,这个控制算法和2D的情况一模一样,唯一的区别就是控制量变成的向量的形式。
xf0=x˙Ts/2
xfΔ=kx˙(x˙−x˙d)
xf=x˙Ts/2+kx˙(x˙−x˙d)
τ=−kp(ϕ−ϕd)−kvϕ˙
虽然这个机器人没有设计用于生成绕Z轴的力矩的机构,用于控制机器人的朝向,但是通过一些技巧,也可以间接实现机器人的转向控制。这个转向力矩与足端提供的力与足端的落地位置有关,可以通过一些额外的机器人运动来产生很小的转向力矩,使得机器人一点点转向。
最后,为了实现机器人位置控制,可以用下述公式来产生机器人的期望运动速度:
x˙d=min[−kp(x−xd)−kvx˙,x˙max]