| column1 | column2 |
|---|---|
 |
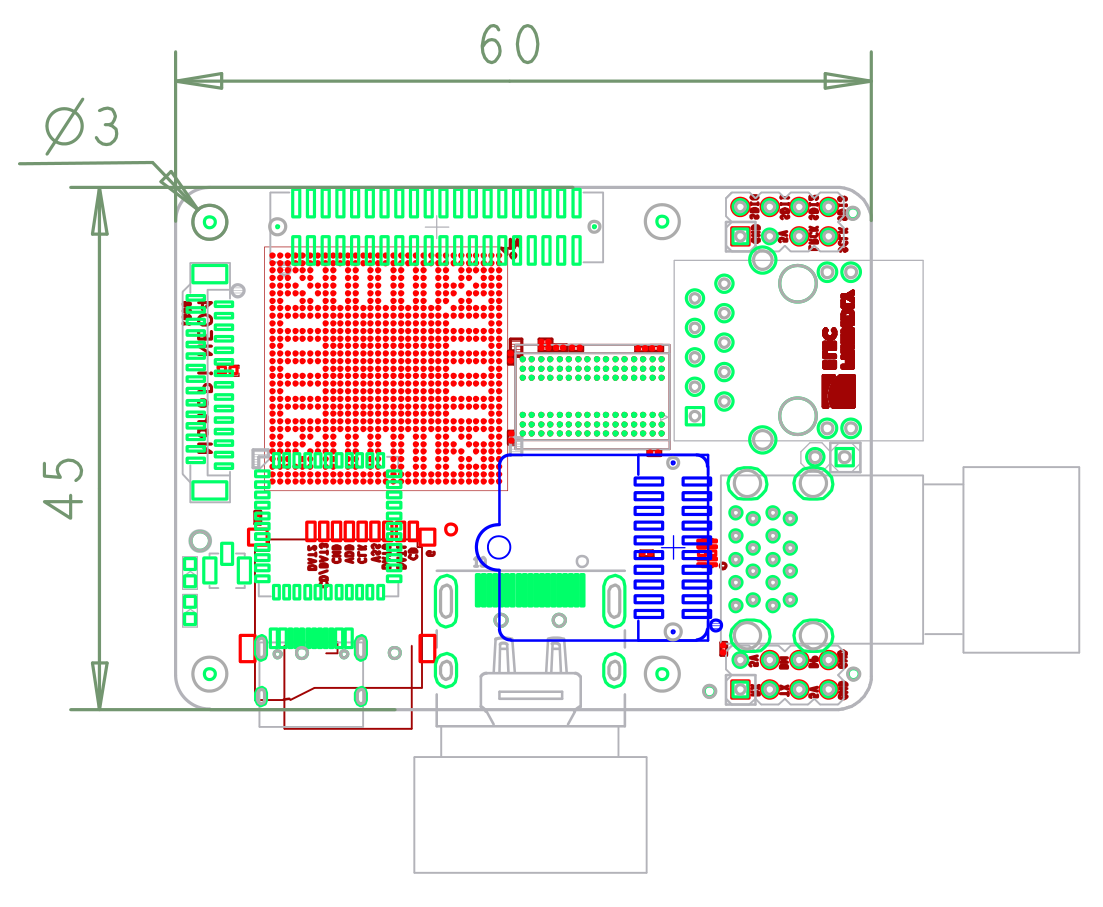 |
最近我购买了这个开发板,准备用于下一个项目,主要因为这个体积小,且有足够的接口供我使用。其次在下一个项目中,不需要完成很复杂的计算任务,控制频率要求也比较低,因此足够满足要求。
我主要想通过ROS2来实现NanoPi NEO4的控制,因此首先需要配置环境来运行ROS2。
经过各种尝试后,我最后选择了FriendlyDesktop这个基于Ubuntu 18.04的系统。原本的设想是使用Debian 11 Bullseye,但是配置过程过于痛苦,还是放弃了。当前的系统可以直接安装稍微老一点的ROS2,对于只需要完成基本通信功能的我来说已经足够了。
下一个博客应该就会放出下一个项目的基本信息~