使用ROS2进行多机通讯是很简单的,只需要在.bashrc文件中添加export ROS_DOMAIN_ID=4这样的环境变量就可以了。需要进行通讯的多个机器在同一个局域网内,并保持ID相同即可。
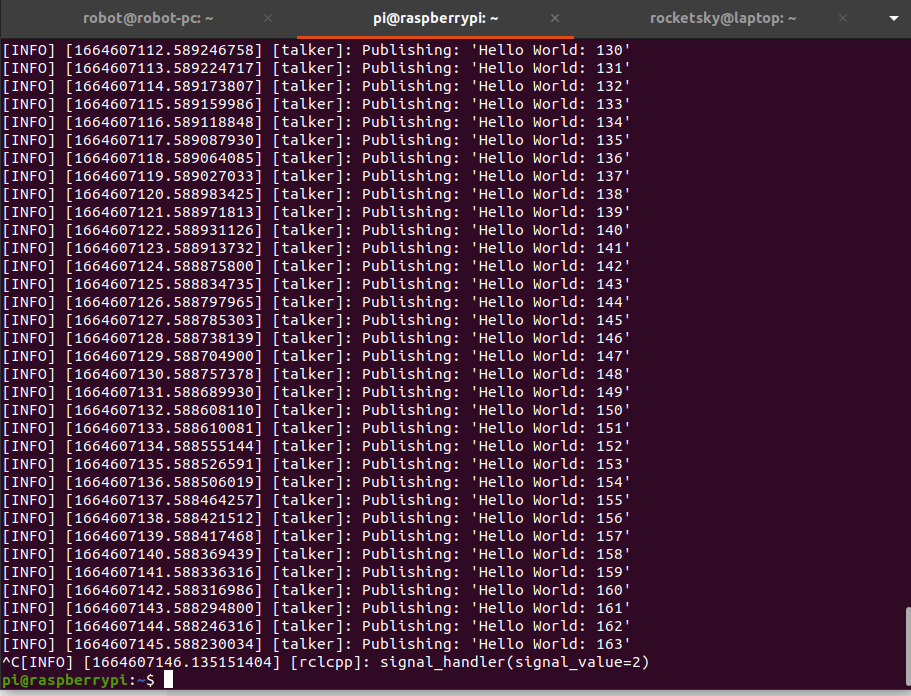
下图是使用树莓派通过ROS2的demo发送信息。
在同一个局域网中配置了两个接收器,一个是笔记本电脑,一个是另外的嵌入式设备,运行结果如下:
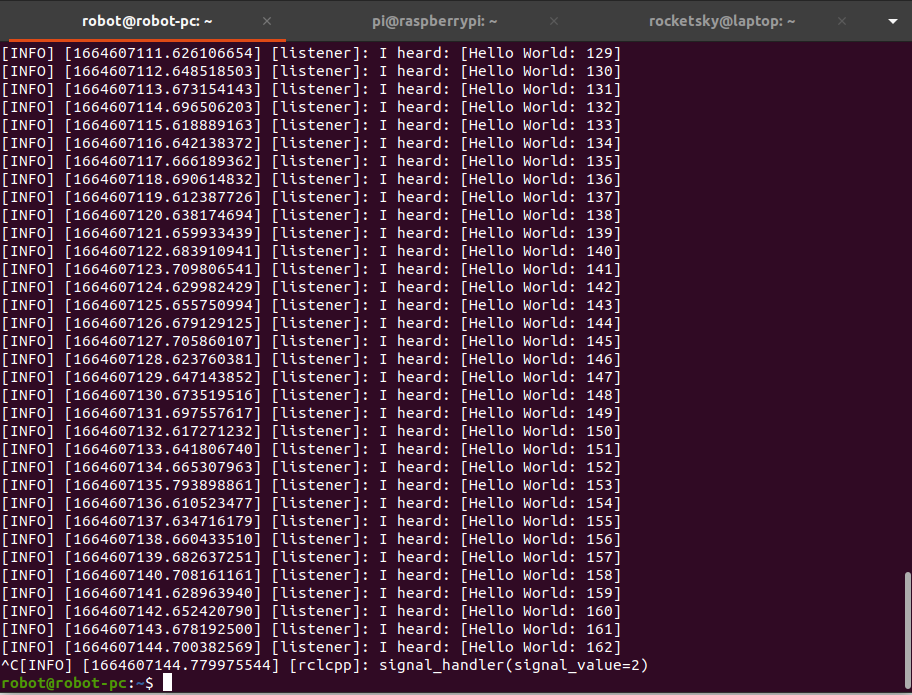
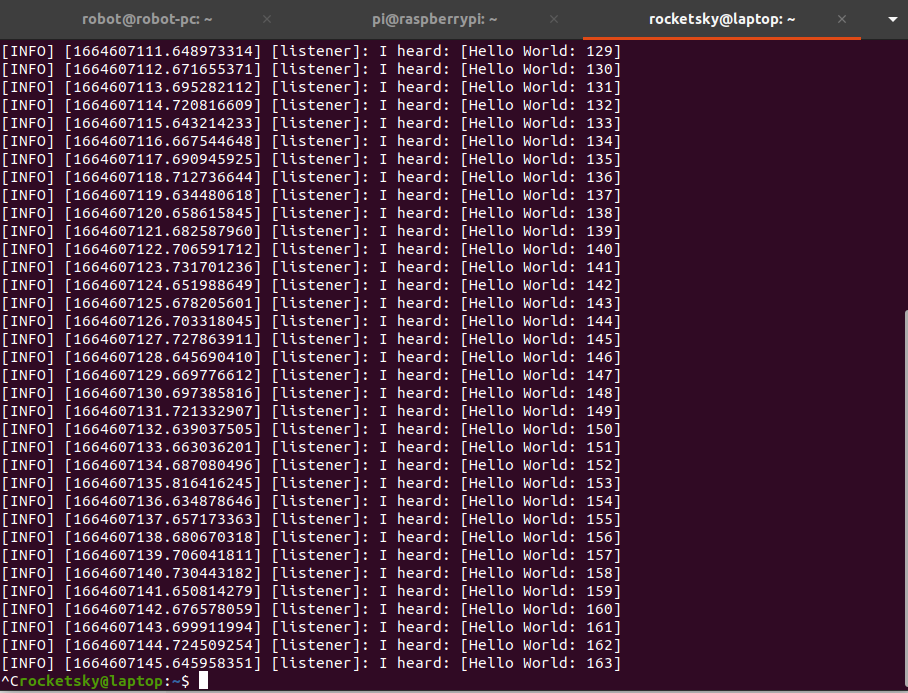
成功接收信息。
Rocket Sky
使用ROS2进行多机通讯是很简单的,只需要在.bashrc文件中添加export ROS_DOMAIN_ID=4这样的环境变量就可以了。需要进行通讯的多个机器在同一个局域网内,并保持ID相同即可。
下图是使用树莓派通过ROS2的demo发送信息。
在同一个局域网中配置了两个接收器,一个是笔记本电脑,一个是另外的嵌入式设备,运行结果如下:
成功接收信息。