本篇主要是开始搭建了高擎机电的双足机器人的仿真环境,初步进行了机器人仿真电机测试。具体的代码在该仓库,使用webots2023a进行仿真。同时也提供一个初步的pybullet仿真环境,代码在此。
高擎官方是提供了该机器人的URDF文件,不过为了在webots中进行仿真,需要使用URDF2WEBOTS软件进行格式转换。转换后的模型文件里的mesh都是硬编码的绝对路径,需要稍微修改成相对路径,方便其他人使用。
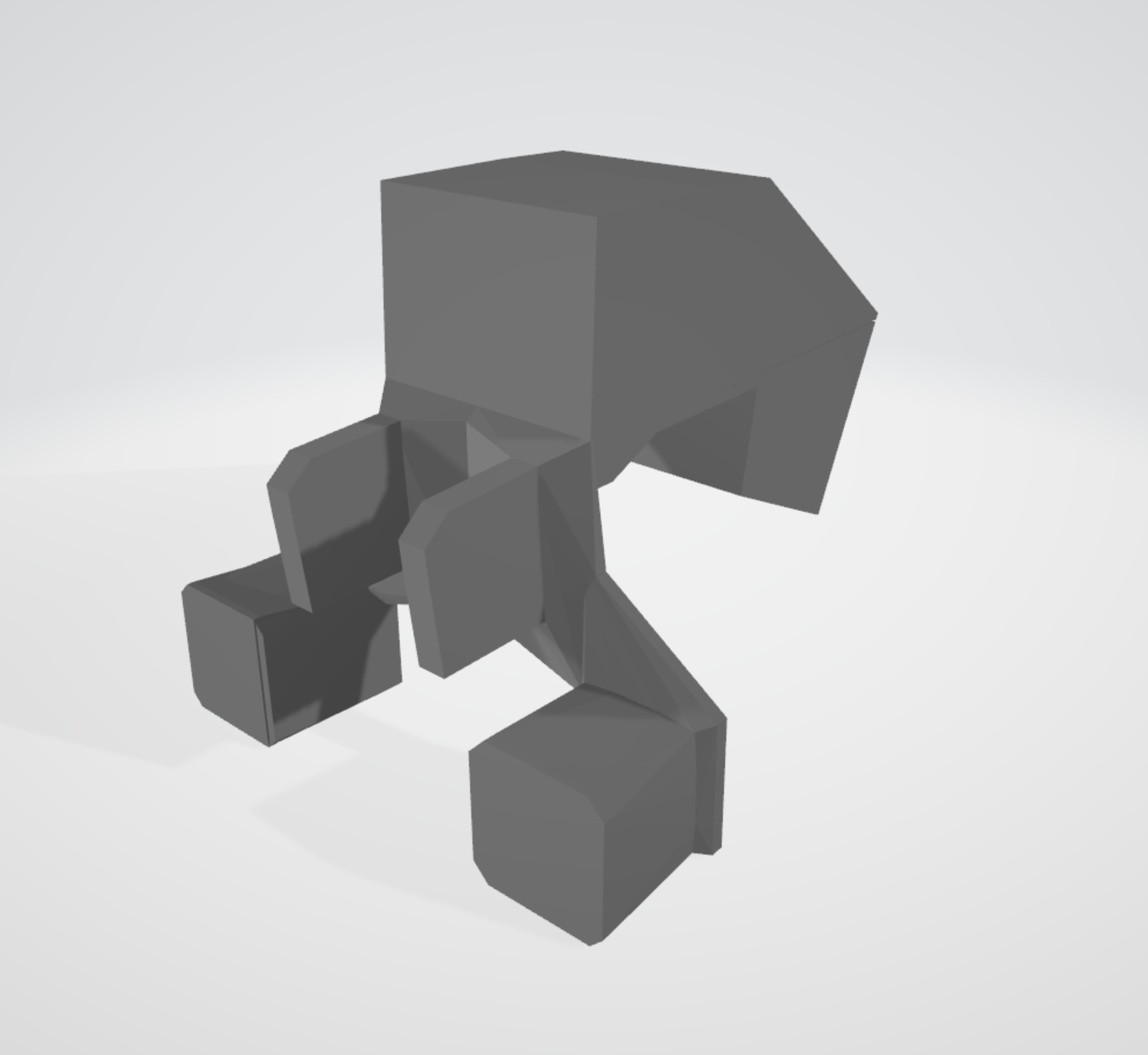
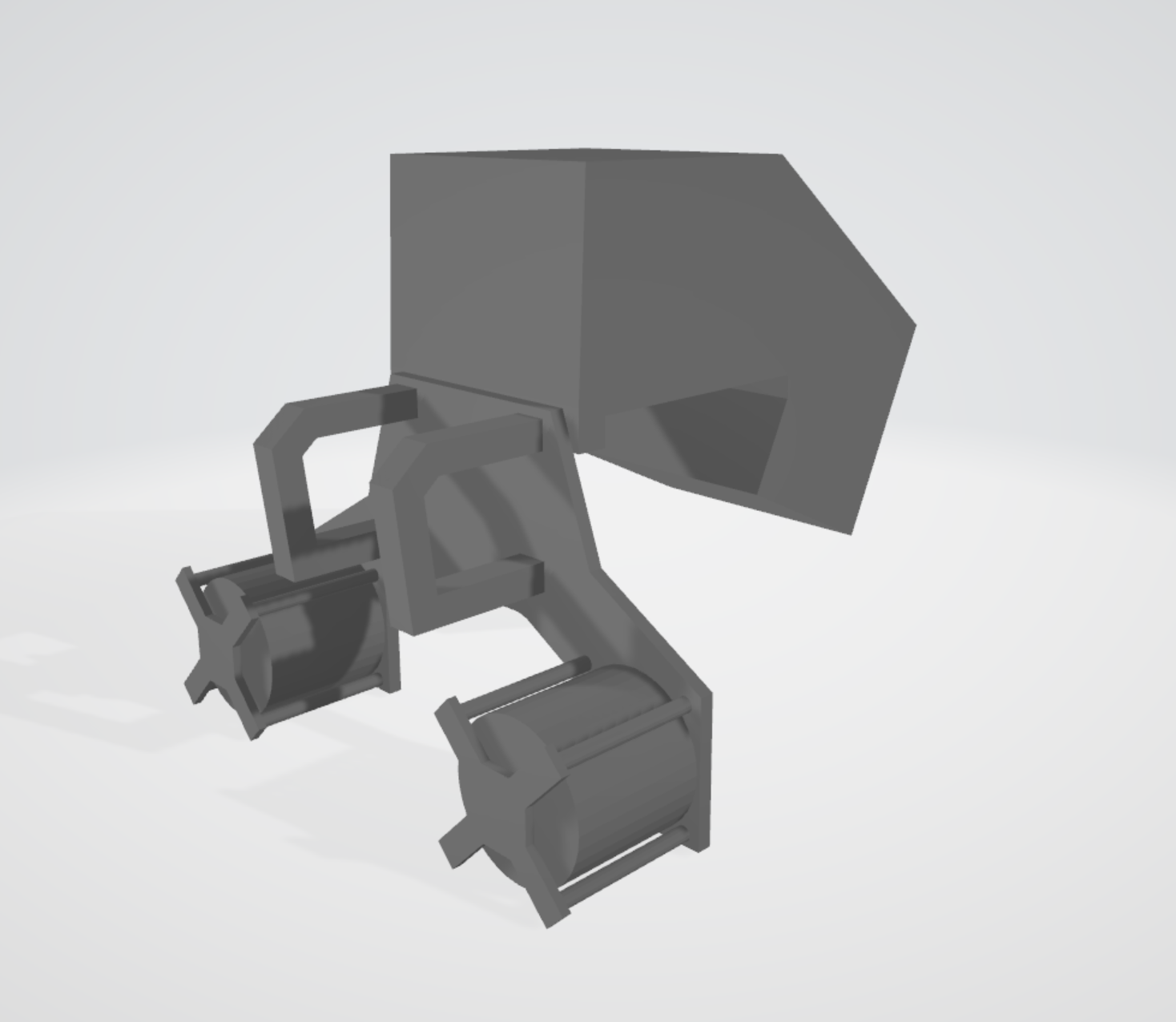
在开始仿真时,还遇到一点小问题,webots提示模型复杂,影响效率,同时为了后续采用GJK算法进行机器人自身碰撞检测,准备将官方提供的模型进行化简,在这里我采用了v-hacd软件来完成mesh模型化简。
化简前后的模型如下两图所示,可以看到化简后模型去掉很多无用的细节,加速仿真。
后续文章将会开始初步仿真控制。