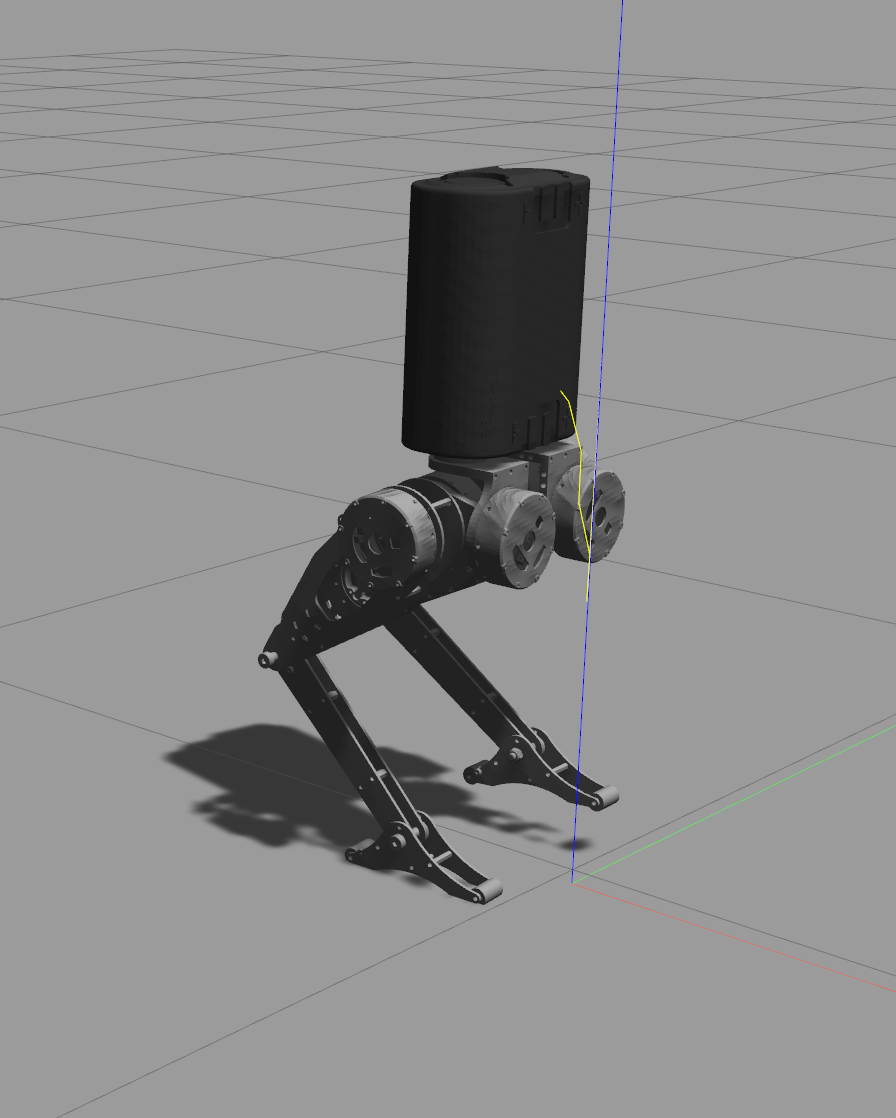
最近我尝试了Hector仿真的项目,感觉这个是一个易于移植的双足机器人控制框架,可以快速集成新的控制算法。不过在部署到实际机器人时,应注意这个项目中缺少关于状态估计的代码,需要补充。相关代码链接如下:Hector_Simulation
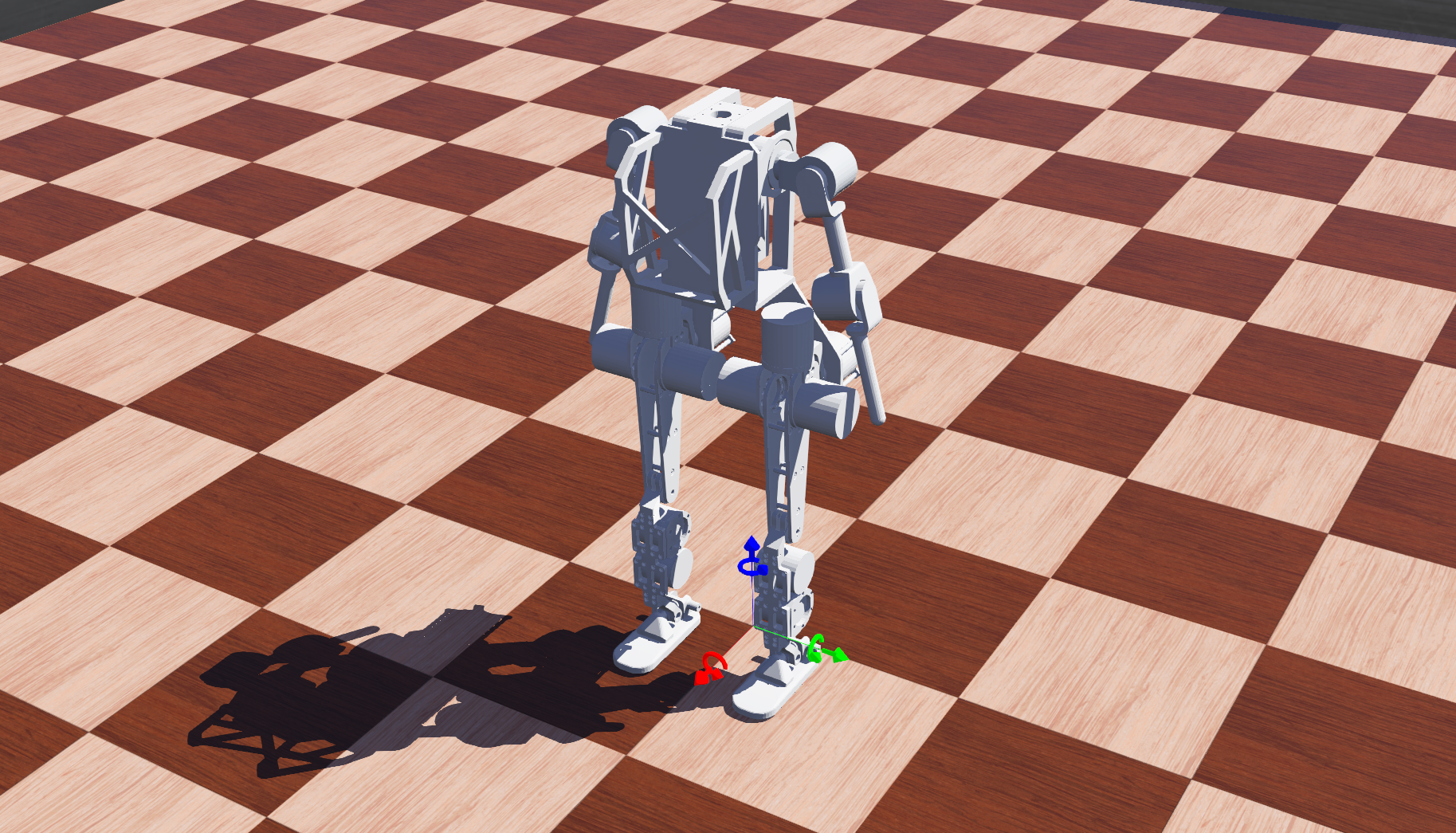
高擎机电最近出了新的仿人机器人,售价3W,我要了一份URDF的模型,准备进行相关仿真的开发。配置好的webots仿真环境如下humanoid_webots_sim,已经完成了初步初始化的操作,可以进行后续开发。
Rocket Sky
最近我尝试了Hector仿真的项目,感觉这个是一个易于移植的双足机器人控制框架,可以快速集成新的控制算法。不过在部署到实际机器人时,应注意这个项目中缺少关于状态估计的代码,需要补充。相关代码链接如下:Hector_Simulation
高擎机电最近出了新的仿人机器人,售价3W,我要了一份URDF的模型,准备进行相关仿真的开发。配置好的webots仿真环境如下humanoid_webots_sim,已经完成了初步初始化的操作,可以进行后续开发。