Rocket Sky
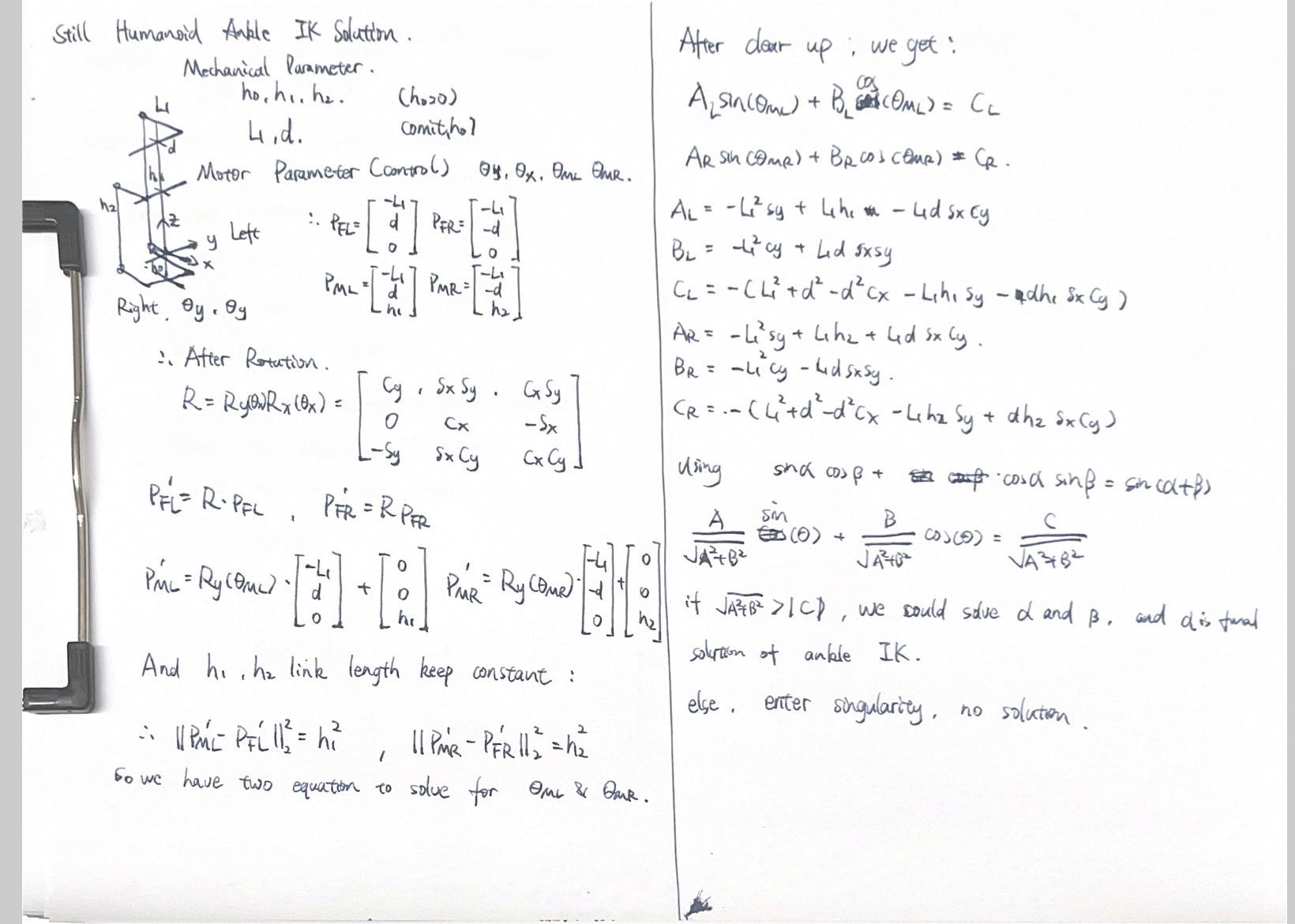
这次新的人形机器人脚踝结构是由并联机构构成的,本章就进行这个机构的运动学分析,并通过雅可比来计算控制力矩。
根据解算结果进行控制,得到的控制效果如下所示:
双足机器人仿真05-脚踝并联机构运动计算
2023-12-01